MorpHex Project – Morphing Hexapod – By Kåre Halvorsen – 81020
DESIGNED BY :
MorpHex video part II
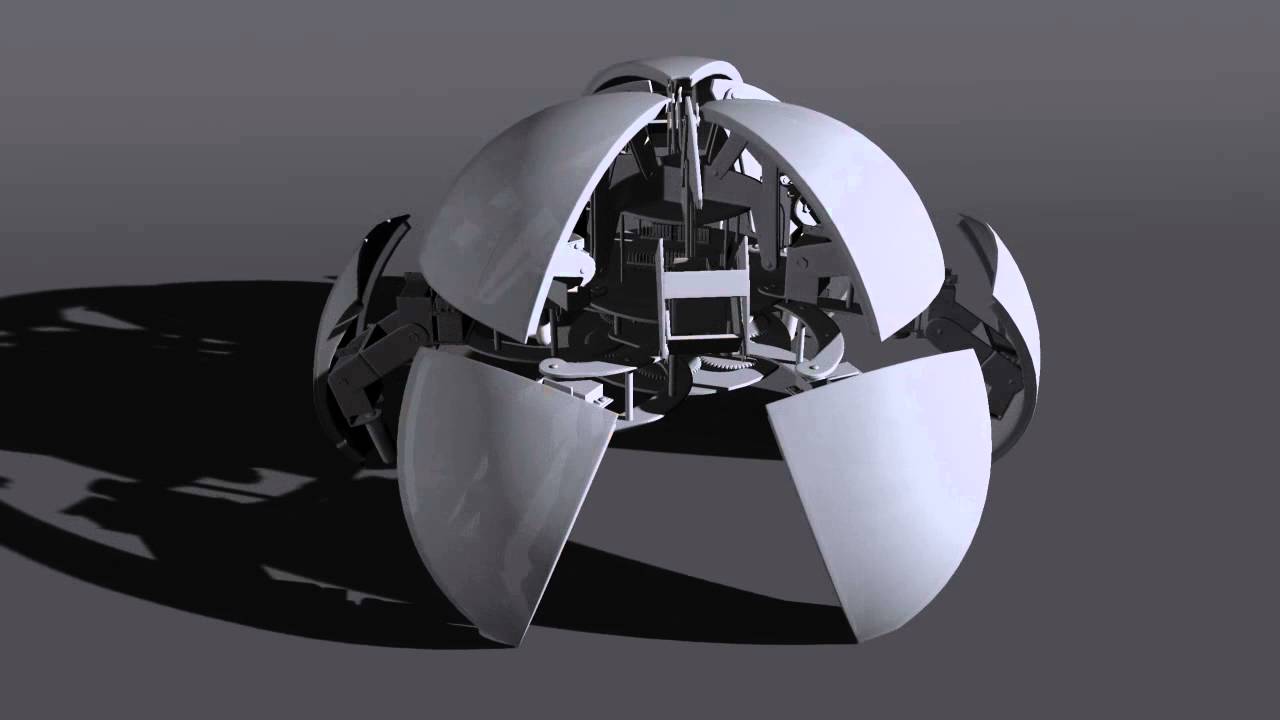
A hexapod robot that can transform into a sphere shape and back. Still under construction… Featuring 25 servos. 12x 5990, 13x 5645 Hitec servos, Basicmicro ARC-32 board, XBee, 2S 5000mAh LiPo, Turnigy 8amp regulator.
MorpHex, finalizing the upper section
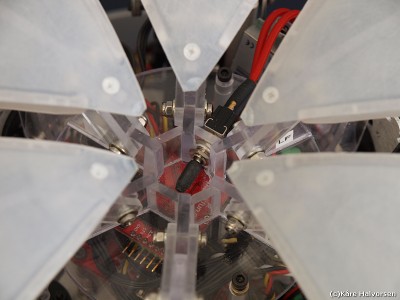
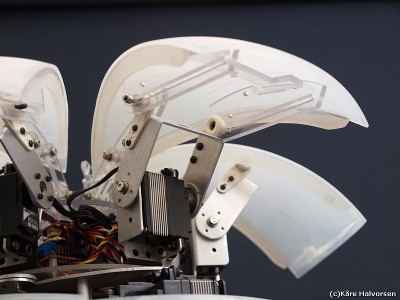
When I posted the MorpHex part II video I cheated a little to make the upper sphere sections to operate as intended. The “cheat” was to use some kitchen rubber bands. As you can see from the pictures below the 5990 servo push the upper section out/upward. The rubber-band work like a spring and simply make the sphere section move inward.


As you probably can imagine, this isn’t a very stable solution. Since my goal is to make MorpHex able to roll, the upper sphere sections will be needing some additional support. I’m solving this by making six special brackets.
Some details behind the process of making the brackets:
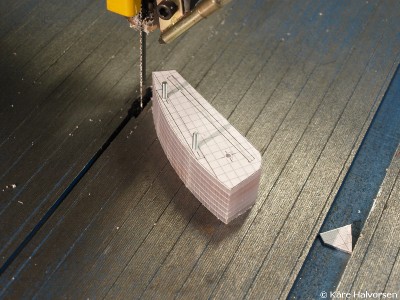
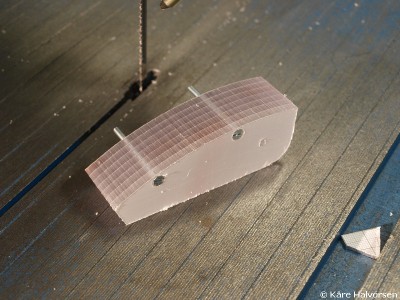
The brackets are made of PC (Poly Carbonate). All handmade using a band-saw to cut them out. I’m using a simple technique by cutting six at ones:
Using two long 3mm screws for clamping the parts together. By making six in one cut you save time and its easier to make several duplicates.
I do wish I had a CNC machine though! Would be so much easier to make even more complex parts. The next step is to mill out a track/slot. I’m using a manual XYZ milling/drilling machine:
A simple table made of rubber coated aluminium holds the parts in place:


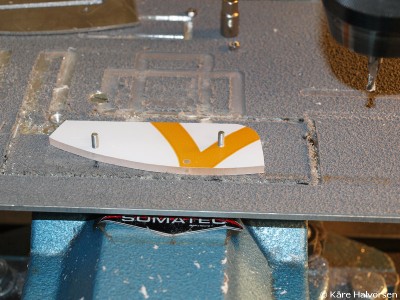
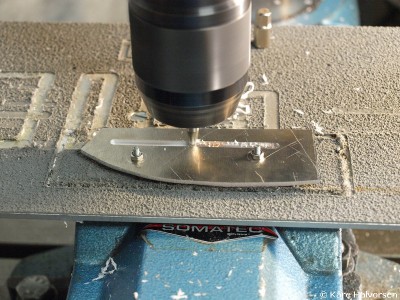
I’m using a guidance template of aluminium to hold the PC part in place:
Milling out the guidance track:



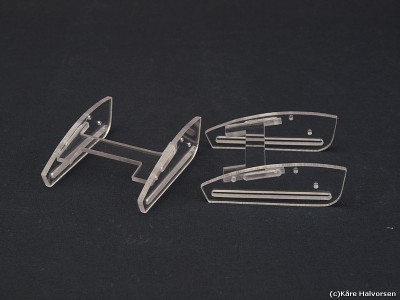
I didn’t take any photos of the next process. But I had to repeat it one more time to make an additional slot and also make a little part that hold a pair of the main parts together. The final result of the brackets looks like this:
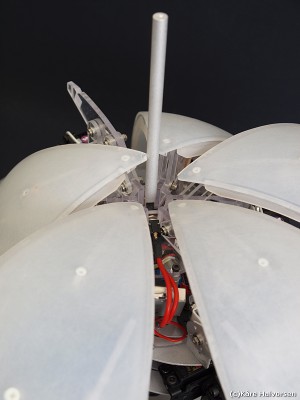
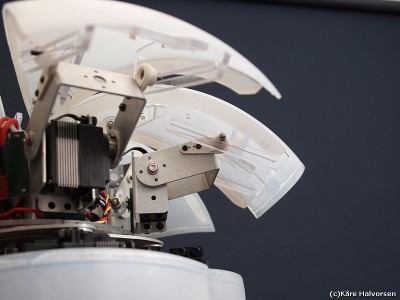
The parts are glued together. Mounting the brackets to each sphere section was relative easy. I’m using only one nylon 4mm inset screw for mounting the bracket. As you can see the brackets makes the upper sphere section much more stable and no need for rubber bands:
So far I’m very satisfied with the result. Without even doing any changes to the code I’ve managed to make MorpHex roll! So far the rolling motion is not very controllable, more like a proof of concept. But when I’m finished writing the “roll code” it will perform much better and hopefully be easier to control in “roll mode” too.
The kill-switch.
I did spend some time to figure out a good solution for operating the servo power switch. Its operated using a simple tool for turning it ON. As you also could see in the video turning it OFF is pretty easy (KISS). Close-up of the switch:
The little hole work as a hook for turning the switch ON: