
The latest version of the LittleDog Robot – 11041
This is the more advanced version of this robot, created by the University of Southern California. The robot is completely autonomous and trained by machine...

World's Largest Robot Resource
This is the more advanced version of this robot, created by the University of Southern California. The robot is completely autonomous and trained by machine...
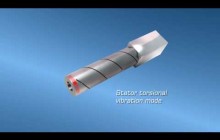
Microrobot conceptual video concerning our research activity as reported in the Journal of Micromechanics and Microengineering

This animation shows the manufacturing process and applications of a research project at Seoul National University, Korea (Nano Printing Lab, also Innovative Design and Integrated...

Researchers at the University of Colorado Boulder are developing a swarm of intelligent robots that can work together to perform tasks, like containing an oil spill or building a space station.

This is a End effector that uses a small standard size RC motor with a worm gear to to open and close the gripper. It uses a 4 bar linkage mechanism in it’s design which i will be using for an upcoming robotics project. Due to requests the Solidworks 2009 files of the gripper are posted below.

The use of ground robots in military explosive-ordinance-disposal missions already saves many lives and prevents thousands of other casualties. If the current limitations on mobility and manipulation capabilities of robots can be overcome, robots could potentially assist warfighters across a greater range of missions. DARPA’s Maximum Mobility and Manipulation (M3) program seeks to create and demonstrate significant scientific and engineering advances in robot mobility and manipulation capabilities.

Nature is our best engineer, and the finest robots are the ones that mimic it.

Molecubes could play a significant role in technical training in the near future. These cubes, fitted with computer chips, can be successively attached to each other. Each Molecube communicates with all the other cubes; the energy supply and transmission of signals from one Molecube to the next are thereby ensured. Young people can use the Molecubes to build and program their own robots.

See more at http://www.barobo.com. iMobot is an Intelligent Modular Robot designed for college and university teaching and research. It has four controllable degrees of freedom. The faceplates can turn continuously so an individual module is able to drive as though with wheels. This significantly increases the mobility of each module, allowing it to traverse a wide variety of terrain without an overcomplicated physical shape.
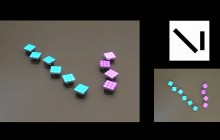
Arbitrary target patterns are represented with an optimal robot deployment, using a method that is independent of the number of robots. Furthermore, the trajectories are visually appealing in the sense of being smooth, oscillation free, and showing fast convergence. A distributed controller guarantees collision free trajectories while taking into account the kinematics of differentially driven robots. Experimental results are provided for a representative set of patterns, for a swarm of up to ten differentially-driven robots, and for fifty virtual robots in simulation.

22 Apr, 2015

10 Feb, 2015

Robotic MECHANISMS – SCREW SYSTEMS 51007
30 Dec, 2014

Robotic MECHANISMS – PULLEY SYSTEMS 51005
30 Dec, 2014

Efficiency of Machines & Mechanical Advantage 51006
30 Dec, 2014

Land Crawler – Theo Jansen Mechanism 11024
28 Jan, 2013

Simple Mechanical Robotic Leg Design – 11057
5 Feb, 2013

SERVICE ROBOTS in Nursing Homes 11095
23 May, 2013


